
Mise en commun d'un robot mobile sur des stations de travail : flexibilité et optimisation des usages
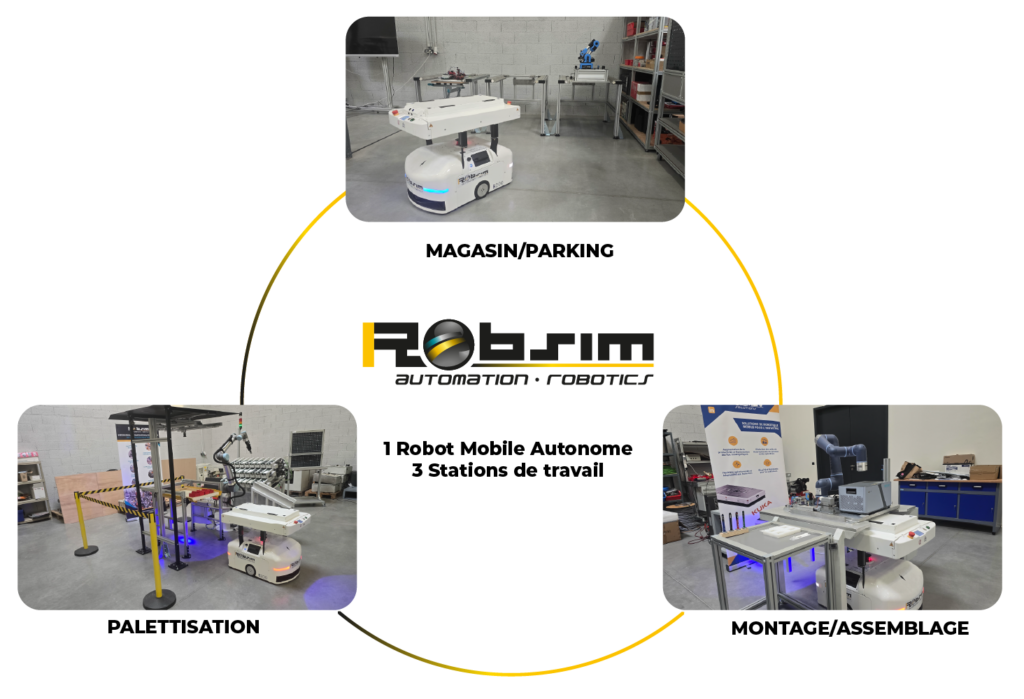
Palettisation
« Du côté droit, vous avez un robot soit industriel, soit collaboratif. Ce dernier va prélever des pièces (de quelques gr jusqu’à 10kg dans ce cas) au magasin et les décharger sur un contenant (plateau, bac,…) en fonction d’un plan de palettisation répondant aux besoins de l’atelier de production. Une fois la mission de palettisation achevée, le robot mobile, doté d’un plateau élévateur, prend en charge le contenant pour le mettre à disposition de la zone de production, de manière autonome.
L’installation peut également être dotée d’une caméra 3D pouvant assurer la supervision de l’opération et le contrôle du positionnement des pièces.
L’embase a été conçue de sorte à pouvoir accueillir tous les robots collaboratifs et industriels standards du marché.
Enfin, l’intégralité de la station peut être transportée par chariot élévateur. Une fonction répondant aux besoins de flexibilité des ateliers. »
Montage/Assemblage
« Le robot mobile apporte et décharge un plateau surmonté d’un cobot. Une fois déchargé par l’AMR, un vérin se libère pour apporter l’alimentation nécessaire au fonctionnement du cobot (énergie, consignes, interface, sécurité, réseau).
Une mission d’assemblage/montage est réceptionnée par un automate via le système ERP client.
Exemple : production de 50 pièces par le robot collaboratif.
Une fois la mission réalisée, le robot se replie dans une position parking et se met en veille.
Une information est envoyée à l’automate pour indiquer que l’AMR est à nouveau disponible pour d’autres missions dans l’atelier.
Le robot mobile autonome quitte la station pour se diriger vers une autre zone de travail ou de parking. »
